從產業鏈多維度對自動駕駛的深度思考
發布時間:2019-08-22 15:39:55
2019年8月,由交大安泰MBA校友會汽車行業專業委員會舉辦的“自動駕駛技術趨勢分享會”順利完成。本次活動旨在讓廣大校友以及業內人士能夠對汽車自動駕駛有更為清晰的理解和認知,以下是全文報告。
2019年8月,由交大安泰MBA校友會汽車行業專業委員會舉辦的“自動駕駛技術趨勢分享會”順利完成。本次活動旨在讓廣大校友以及業內人士能夠對汽車自動駕駛有更為清晰的理解和認知,以下是全文報告。
第一位分享嘉賓,來自華東某知名自主整車廠的智駕系統經理:王林先生,從整車廠角度給我們做了相關分享。
首先,王經理認為傳統汽車的發展主要分為自動化和網聯化,最終會朝著智能網聯相結合的方向發展。自動化,顧名思義,是由車代替人來完成一系列動作。網聯化,是指車輛可以借助于網絡與其他車輛或者基礎設施進行信息的交互,在這過程中可以產生額外的價值和服務。由于受到技術及基礎設施的限制,現階段量產車的研發主要還是以自動化為主,而網聯、5G、V2X的大規模量產還需要一定的時間。
其次,就自動駕駛的分級,王經理展開了詳細的介紹,并指出當前量產車的自動駕駛還是處于Level 2階段,想要達到Level 3還需要整個行業多年的努力。
然后,王經理介紹了自動駕駛的原理,包括系統架構,關鍵技術和零部件,以及主流的自動駕駛發展思路:以整車廠為代表的基于駕駛輔助系統開發經驗,通過傳感器及算法疊加,逐步實現L3+智能駕駛系統;以互聯網企業為代表的以Lidar技術為主,并采用集成式系統架構,將L3+自動駕駛技術研發作為切入點;以新興企業為代表的以低成本傳感器為基礎,實現特定環境的自動駕駛功能盡早完成商業化模式或以人工智能技術為基礎,以迅速積累智能駕駛系統研發技術,來達到彎道超車的目的。

最后,王經理指出了自動駕駛目前面臨的技術和社會難題,如在以下條件下的自動駕駛:極端惡劣天氣、強光或陰暗條件、未知道路或道路有物理缺陷、復雜的社會關系或倫理道德等。同時,也談了談他認為接下來自動駕駛技術的增長點:傳感器融合方案、深度學習、低成本小型化激光雷達、無人駕駛時代的出行方案。
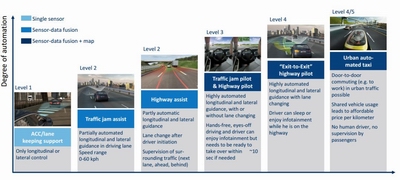
第二位分享嘉賓,來自博世工程技術的項目經理:徐夢慈女士,給我們分享了領先Tier1在自動駕駛領域的一些發展方向。夢慈提及未來汽車的主要趨勢分為自動化、網聯化、電氣化。就自動化來說,Bosch自動駕駛的解決方案主要圍繞自動出行和自動泊車。自動駕駛的優勢:有助于提升行車安全。來自博世內部的一份統計數據表明,1999年汽車安裝ESP和ABS之前,90%的汽車交通事故源于駕駛員自身的問題,自1999年汽車安裝ABS和ESP以后,截止2013年,汽車事故率下降了60%。1. 可靠的傳感器數據輸入:通過不同傳感器的組合實現360°環繞感測,可以幫助汽車判斷下一步的動作;2. 功能安全和信息安全:分別用來應對車輛電子系統的失效以及黑客的攻擊;3. 全球化標準的法律法規:能夠清晰的定義或者判定自動駕駛事故的責任;4. 系統架構:需要考慮到傳感器、ECU、執行器的冗余,用來應對故障的發生;1. ACC/lane keeping support (Level 1):橫向或縱向的駕駛輔助,如ACC自適應巡航,或者車道保持功能;2. Traffic jam assist (Level 2):60km/h以內,部分橫向和縱向結合的駕駛輔助;3. Highway assist (Level 2):在駕駛員的確定下可以超車;4. Traffic jam pilot & Highway pilot (Level 3):高度的自動駕駛,但是在車輛出現故障時候,駕駛員需要接管車輛;5. “Exit-to-Exit” highway pilot (Level 4):指定路線的高級自動駕駛,乘客無需操作;6. Urban automated taxi (Level 4/5):無人駕駛。
1. Park steering control:車輛負責自動轉向,駕駛員負責踩油門和制動踏板;2. Park maneuver control:車輛負責自動轉向和制動,駕駛員負責踩油門踏板;3. Remote park assist:遠程泊車,駕駛員不需要在車里;4. Home zone park assist:對于固定線路的車位,車輛自動駛回并停好;5. Remote park pilot:車輛自動找車位,無需駕駛員,但是需要駕駛員在旁監控;6. Automated valet parking:車輛自動找車位,同時無需駕駛員在旁監控。
第三位分享嘉賓,來自地平線的商務戰略總監:吳石廬先生,給我們帶來了從芯片角度如何支撐自動駕駛的分享。在芯片方面,地平線側重于駕駛類、非駕駛類AIoT(人工智能物聯網)的芯片,更多的是用于邊緣計算。汽車行業正處在快速變革期,自動駕駛是最具顛覆性的因素,除了可以減少交通事故之外,它將重塑產業格局,也將激發共享出行的潛力。
自動駕駛汽車所需要的軟件代碼量呈爆炸式增長,遠超IT史上任何一個產品。汽車ECU數量迅速增加。從分布式、有限的ECU,到ECU不斷的增加。在此過程中帶來的問題:ECU性能的瓶頸以及軟件開發的低效。面臨的挑戰:越來越多的傳感器之間的同步及功能協同問題。業內目前的主要解決方案是開發域控制器,其優勢主要為:系統功能集成度提高、數據交互的接口標準化/網絡化、降低成本,提升效率。
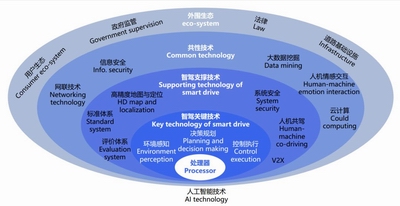
汽車電子軟件的開發與發布模式:從封閉式開發走向生態協同進化,與移動設備App有高度類同,通過虛擬化的中間層將軟件與硬件分離,并不斷的迭代更新軟件實現功能的增加。而在整個技術生態中,人工智能處理器(AI芯片)是最核心的部分。
隨著自動駕駛等級的提升,芯片所需的算力呈指數型提升。在目前行業的規劃里,從算力、功能安全角度來看是可以滿足未來自動駕駛的算力需求的。自動駕駛系統會基于攝像頭、毫米波雷達、激光雷達等傳感器采集的感知數據去做融合,并結合地圖對環境去做完整的建模,從而能夠實現駕駛過程中的預測和決策。隨著5G牌照的發放,未來5G在車輛端開始應用時,MEC(多接入邊緣計算)成為必由之路。AI物聯網的核心難題:每輛自動駕駛車輛每天產生600-1,000 TB數據,2,000+輛自動駕駛車輛每天產生的數據量是250萬兆Bytes,相當于人類在2015年產生的數據量。這么多的數據,通過MEC可以提前做預處理和篩選后再上傳到云端,從而解決上述問題。工業時代可以通過“用電量”側面反映工業的發展情況,數字經濟時代可以通過“用云量”側面反映經濟發展情況,在AI經濟時代可以通過“算力”來側面反映其發展情況。有效算力的核心指標:算力利用率,能源轉化為計算的效率,計算的成本,算力轉化為AI輸出的效率。
第四位分享嘉賓,來自Arm中國的汽車市場高級經理:舒杰博士,給我們帶來了芯片技術方面的分享。Arm是一個IP(Intellectual Property)供應商,即:他們設計芯片,但是不生產芯片,轉而以授權的方式將芯片設計方案出售給其他公司。Arm是從1996年開始進入汽車領域的,到目前為止有超過85%的車載信息娛樂系統(IVI)相關的應用處理器使用的是Arm的架構,有超過65%的自動駕駛相關的應用處理器使用的是Arm的架構,同時,Arm也會涵蓋動力系統、車身、智能座艙、網聯等處理器。
未來車輛的電子系統會越來越復雜,其成本占整車的比重也會越來越大。其中,信息娛樂系統、新能源電控系統、自動駕駛相關控制器的成本占比會越來越高。
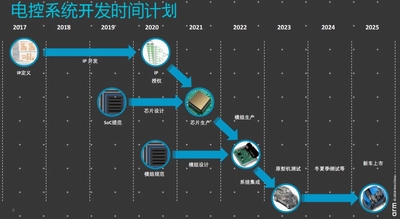
按傳統的周期:一款車用芯片從IP定義與研發、芯片設計與驗證、芯片生產再到供應商的模組生產、原型機測試、整車量產,總體時間大約需要8年;芯片架構設計難點:芯片可量產并不一定代表能收回成本,只有批量生產達到一定規模以后才能收回成本。就自動駕駛這個領域,由于一開始還沒有上規模,汽車芯片的新玩家很可能需要持續投入8年以上甚至將近10年才能收回成本。
過去產業鏈之間呈自上而下的線性關系,隨著汽車自動化、網聯化、電氣化的深入發展,產業鏈內部各級供應商和整車廠會有更多的橫向交流。因此產業鏈會從線性走向跨界、融合、集成,由此催生新的合作模式和增長機會。
隨著自動駕駛的程度越來越高,駕駛員以及乘客會逐漸的對汽車的智能座艙有更高的要求,因此汽車的車載信息娛樂系統(IVI)會逐步向智能座艙轉型;自動駕駛方面,L1, L2級別的汽車已經量產,技術也在逐步提升,現階段會朝著L3或L3+的方向發展;動力系統方面,新能源的大趨勢是不會變的,所以傳統發動機會朝著混動、純電動或是其他能源驅動轉變。上述轉型會給汽車半導體行業的發展帶來飛速增長,汽車內的軟件代碼量會急劇增長,同時技術進步會帶來經濟和社會效益。混合安全等級的系統:安全系統+非安全系統。若智能座艙相關控制器中要集成安全與非安全的應用軟件,此時需要Hypervisor(虛擬機監視器),它可以將安全與非安全的應用以及分別對應的操作系統(如實時性操作系統,LINUX,Android)跑在同一個硬件上。各個公司正在抓緊時間做用于2021/2022年的L3+樣機;真正的大規模部署自動駕駛控制器,該控制器需要具備:服務器的計算性能(算力強)、臺式機的功率要求(功率高),以及筆記本電腦熱特性(風冷或自然冷卻,無需水冷)。
下圖是某汽車2025年后自動駕駛的算力分布情況,它有2個計算平臺來保證能夠滿足自動駕駛所需的算力從而達到高效駕駛,無需人工干預:一個是車載計算平臺,可以做決策;另一個是自動駕駛域處理器。

自動駕駛汽車的生態系統:復雜又廣泛
波音787的軟件代碼1400萬行,而一輛L5的自動駕駛汽車大約有10億+行代碼。因此自動駕駛汽車的代碼量非常非常多,也非常非常復雜,這么多的代碼量也就意味著自動駕駛的生態也非常復雜,需要很多的角色。
最后一位分享嘉賓,來自匯業律師事務所的合伙人:史厚元律師,給我們帶來了從法律角度來看,自動駕駛面臨的挑戰。無論從技術層面還是法律層面來界定,自動駕駛與無人駕駛都是有嚴格的區別。2017年12月,目前國內最早的北京市地方法規《北京市關于加快推進自動駕駛道路測試有關工作的指導意見》對自動駕駛車輛做了規定:測試車輛必須能夠對自動駕駛功能和人工駕駛功能的隨時切換。
2017年5月份,德國聯邦議會通過了一項道路交通法案:允許“自動駕駛”,不允許“無人駕駛”。規定當自動駕駛系統啟動之后,司機可以轉移注意力,比如去讀書或上網,但司機必須保持足夠的警覺,以便在系統發出請求時恢復人工控制。
從全球范圍內來看,1968年《維也納道路交通公約》中有明確規定:但凡在道路上行駛的車輛中,必須要有駕駛員。
因此,從現有的法律法律上來看,允許自動駕駛,但是不允許無人駕駛。
《北京市關于加快推進自動駕駛道路測試有關工作的指導意見》自動駕駛功能是指自動駕駛車輛上,不需要測試駕駛員執行物理性駕駛操作的情況下,能夠對車輛行駛任務進行指導與決策,并代替測試駕駛員操控行為使車輛完成安全行駛的功能。自動駕駛功能包括自動行駛功能、自動變速功能、自動剎車功能、自動監視周圍環境功能、自動變道功能、自動轉向功能、自動信號提醒功能、網聯式自動駕駛輔助功能等。自動駕駛系統是指能在某一時段執行自動駕駛功能的 系統。機動車輛僅含以下機動車輔助類自動化系統不屬于自動駕駛系統:主動安全輔助系統、電子盲點輔助系統、防撞系統、緊急制動系統、停車輔助系統、自適應巡航系統、車道保持輔助系統、車道偏離報警系統、交通堵塞排隊援助系統等。自動駕駛涉及公共安全、社會規則甚至社會倫理等諸多方面。從技術突破到真正規模化運行,中間還有太多要解決的問題。而作為公共交通安全基本保障的相關法律,在新技術大潮中如何發揮規范指引作用,平衡新技術與公共安全的關系,是對立法者智慧的重要考驗,一定程度上也是影響新技術及相關企業命運的重要因素。
最后,史律師從公眾利益最為相關的事故責任及保險理賠二個維度對自動駕駛面臨的法律挑戰做了前瞻性的分析。
來源:交大汽車觀察