沈陽自動化所在協作機器人研究中取得進展
發布時間:2020-07-21 14:27:56
近年來,協作機器人研究團隊在中科院重點部署項目、國家發改委新一代信息基礎設施建設工程和“互聯網+”重大工程項目等資助下,系統地開展了協作機器人機構和結構的優化設計方法研究,取得了一系列高水平的研究成果,為協作機器人的設計開發提供了理論依據和技術支撐。
近日,中國科學院沈陽自動化研究所協作機器人研究團隊提出了一種基于有限元子結構法和正交設計的協作機器人全域多目標優化設計方法,該方法以機器人彈性變形、固有頻率以及質量等多種性能指標為優化目標,解決了協作機器人結構優化中存在的位姿及非結構參數影響、多目標耦合、計算速度與精度平衡等問題,具有建模精度高、計算速度快、對各模塊的復雜形狀適應性好等特點,能夠有效提高協作機器人的剛度及動態性能,相關成果發表于優化設計領域國際著名期刊Structural and Multidisciplinary Optimization。
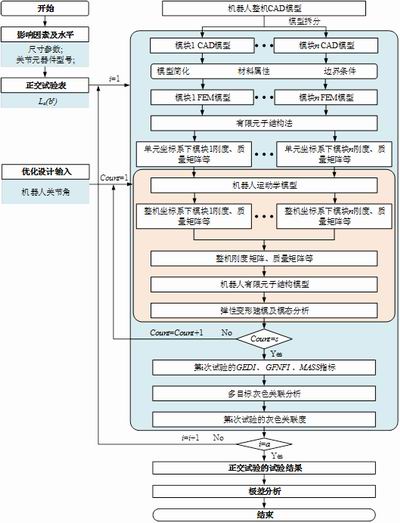
協作機器人多目標優化設計流程
近年來,協作機器人研究團隊在中科院重點部署項目、國家發改委新一代信息基礎設施建設工程和“互聯網+”重大工程項目等資助下,系統地開展了協作機器人機構和結構的優化設計方法研究,取得了一系列高水平的研究成果,為協作機器人的設計開發提供了理論依據和技術支撐。
來源: 中國科學院沈陽自動化研究所

